(Under construction, please leave alone)
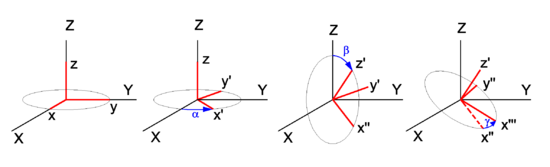
PD Image Figure 1. Euler angles. From left to right: initial configuration, after rotation over angle α, after rotation over angle β, and after rotation over angle γ.
In physics, mathematics, and engineering, Euler angles are three rotation angles, commonly denoted by 0 ≤ α ≤ 2π, 0 ≤ β ≤ π, and 0 ≤ γ ≤ 2π. Any rotation of a 3-dimensional object can be performed by three consecutive rotations over the three Euler angles.
Different conventions are in use: a rotation can be active (the object is rotated, the system of axes is fixed in space), or passive (the object is fixed in space, the axes are rotated).
The choice of rotation axes may vary; a very common active convention is the z-y′-z′ convention. Attach a system of Cartesian coordinate axes to the body that is to be rotated (the coordinate frame is fixed to the body and is rotated simultaneously with it); in the figure the body-fixed frame is shown in red and labeled by lowercase letters. First rotate around z, then around the new body-fixed y-axis, y′, and finally around z′. Another convention often used is the z-x′-z′ convention, where instead of over the new y-axis the second rotation is over the new x-axis. Also the x-y′-z′′ convention is used.
The right-hand screw rule is practically always followed: the rotation axis is a directed line and a positive rotation is as a cork screw driven into the positive direction of the axis.
Euler angles are used in many different branches of physics and engineering. The present article is written from the point of view of molecular physics, where the objects to be rotated are molecules.
Geometric discussion
In Figure 1 the space-fixed (laboratory) axes are labeled by capital X, Y, and Z and are shown in black. The body to be rotated is not shown, but a system of axes fixed to it is shown in red. One may use any convenient orthonormal frame as a body-fixed frame. Often the body-fixed axes are principal axes, that means that they are eigenvectors of the inertia tensor of the body. Also symmetry axes, when present, may be used. When the body has symmetry axes, the principal axes often coincide with these.
The z-y′-z′ convention will be followed. Initially, the two frames coincide, and the path to a final arbitrary orientation of the body—and its frame—is depicted on Figure 1. The first rotation is around the z-axis, which coincides with the Z-axis. The x- and y-axis move in a plane perpendicular to the z-axis over an angle α. The second rotation is in a plane through the origin perpendicular to the y′-axis. The angle is β. The present convention has the great practical advantage that the z′-axis has the usual spherical polar coordinates α ≡ φ (longitude angle) and β ≡ θ (colatitude angle) with respect to the space-fixed frame. (For instance, due to this fact the complex conjugate of the m = 0 column of the Wigner D-matrix consists of spherical harmonics). The final rotation is in a plane perpendicular to the z′-axis over an angle γ. From geometric considerations follows that any orientation of the body-fixed frame in space may be obtained.
Write  for the rotation matrix that describes a rotation around the unit vector
for the rotation matrix that describes a rotation around the unit vector  over an angle
over an angle  .
Clearly the three consecutive Euler rotations correspond to rotations around
the unit vectors along the body-fixed axes z, y′, and z′ over angles α β, and γ, respectively. Because a matrix acts on a column vector to its right, the order in the matrix product is as in the leftmost term in the following equation.
It will be shown that the corresponding matrix product can be written in reverse order (but around fixed, unprimed, axes z, y, z), that is,
.
Clearly the three consecutive Euler rotations correspond to rotations around
the unit vectors along the body-fixed axes z, y′, and z′ over angles α β, and γ, respectively. Because a matrix acts on a column vector to its right, the order in the matrix product is as in the leftmost term in the following equation.
It will be shown that the corresponding matrix product can be written in reverse order (but around fixed, unprimed, axes z, y, z), that is,

Before proving the first equality in the above equation (reversal of order), we derive the matrix for a rotation around the z-axis, see Figure 2. The rotated vector has components

The derivation of the matrix for rotation around the y-axis proceeds along the same lines. Note that the angle of a vector with the x-axis decreases by a rotation around the positive y-axis.
(To be continued)
Algebraic treatment
A proper rotation matrix R can be
factorized thus

which is referred to as the Euler z-y-x parametrization,
or also as

the Euler z-y-z parametrization.
Here the matrices representing rotations around the z, y, and x axis, respectively, over arbitrary angle φ, are

Proof
First the Euler z-y-x-parametrization will be proved by describing an
algorithm for the factorization of R.
Consider to that end the matrix product

The columns of the matrix product are for ease of reference designated by a1, a2, and a3.
Note that the multiplication by
Rx(ω1) on the right
does not affect the first column, so that a1 =
r1 (the first column of the matrix to be factorized).
Solve  and
and  from the first column of
R,
from the first column of
R,

This is possible. First solve for  from
from

Then solve for  from the two equations:
from the two equations:

Knowledge of and determines the vectors a2 and a3.
Since a1, a2 and a3 are the columns of a
proper rotation matrix they form an orthonormal right-handed system. The plane spanned by a2 and a3 is orthogonal to  and hence the plane contains
and hence the plane contains  and
and
 . Thus the latter two vectors are a linear combination of the first two,
. Thus the latter two vectors are a linear combination of the first two,

Since  are
known unit vectors we can compute
are
known unit vectors we can compute

These equations give  with
with  .
.
Augment the 2×2 matrix to the 3×3 matrix  , then
, then

This concludes the proof of the z-y-x parametrization.
The Euler z-y-z parametrization is obtained by a small modification of the previous proof. Solve
and
from  (the rightmost multiplication by Rz(ω1) does not affect r3)
and then consider
(the rightmost multiplication by Rz(ω1) does not affect r3)
and then consider

or,
 The equation for R can be written as
The equation for R can be written as

which proves the Euler z-y-z parametrization. It is common in this parametrization to write

(To be continued)
